4. 次世代移動体通信ネットワーク(Beyond 5G/6G)に関する研究
4.1. セルラーV2Xのための移動体通信サービスに関する研究
4.1.1. エッジコンピューティング技術を活用したセルラーV2Xにおける衝突検知手法に関する研究(一部、KDDI総合研究所との共同研究)
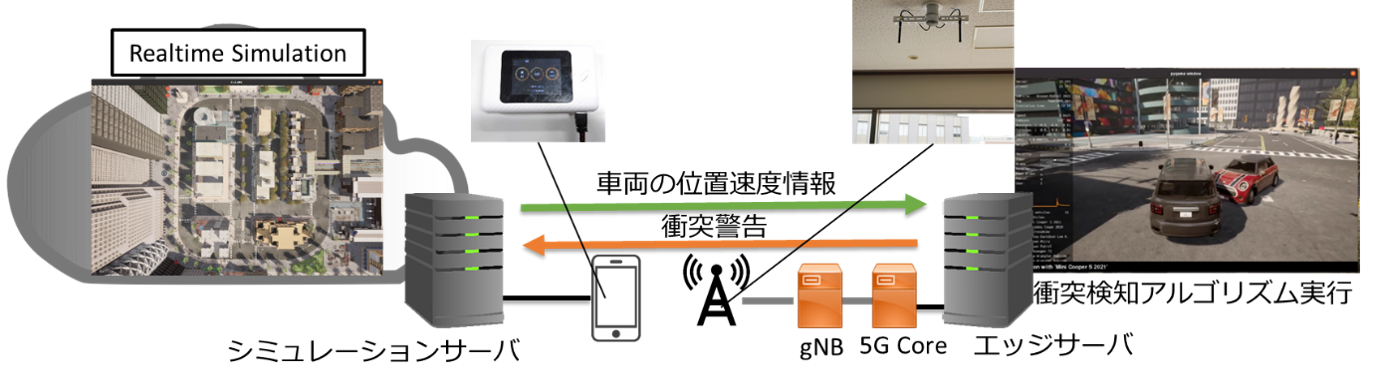
エッジコンピューティングのユースの検討が国内外で進められている。その1つとして、車両や歩行者から局所的に得られる環境情報をデータセンターで収集・解析し、車両群へ安全性に関する情報をフィードバックすることで安全性を高めるITS(Intelligent Transport Systems)アプリケーションへの期待が高まっている。見通しの悪い交差点における衝突検知など、ITSアプリケーションの高度化のためには、車両の自律的な認知機能に加え、車両間で情報共有する機能や各車両で得られる情報を分析して活用する機能が不可欠である。そのため、セルラーシステムを介して車両環境情報をエッジサーバー上に収集して解析し、車両に解析結果をフィードバックするC-V2Xシステムが注目されている。しかし、例えば交差点における車両同士の衝突を検知する既存手法の多くは、車両位置の線形予測に基づく位置推定手法にもとづいており、車両の加減速による位置のばらつきが考慮されていない。
本研究では、車両位置を確定的に算出し利用するのではなく、車両の確率的挙動にもとづいて車両位置を確率的に算出し、衝突の可能性を確率的かつ定量的に捉える衝突検知手法を提案している。提案手法は、車両環境情報受信以前の位置確率分布算出に用いた計算結果を利用し新しく得られる位置速度情報との予測誤差を用いて逐次補正する衝突検知手法である。大阪大学情報科学科に設置したローカル5G環境とエッジサーバーを用いて衝突検知システムを構築し、さらに交通シミュレータCARLAによる実時間シミュレーションと連動させることによって交差点進入時の衝突検知性能を評価した。その結果、逐次補正を用いない既存手法では通知すべき衝突リスクの80%が進入時までに通知されないことがわかった。一方、提案手法では、すべての衝突リスクが通知されることが明らかとなった。
[関連発表論文]
- Ryu Yachikojima, Shin'ichi Arakawa, Takeshi Kitahara, Nagao Ogino, Go Hasegawa, and Masayuki Murata, “Low-latency probabilistic collision detection method for C-V2X applications,” in Proceedings of 7th In-ternational Commercial Vehicle Technology Symposium, (Kaiserslautern), September 2022.
- 中村 樹, 荒川 伸一, 宮坂 拓也, 田上 敦士, 長谷川 剛, 村田 正幸, “5G通信技術を用いたC-V2Xにおけるセルラーリソース割当手法の実装と評価,” 電子情報通信学会技術研究報告, vol. 122, no. 310, NS2022-142, pp. 70-75, December 2022.
4.1.2. セルラーV2Xのためのリソース割当手法に関する研究(一部、KDDI総合研究所との共同研究)
近年の組込みシステム技術や通信技術の進歩に伴い、CPS(Cyber-Physical System:サイバーフィジカルシステム)の実用化が進んでいる。CPSでは、フィジカルシステムにおいてセンシングを行い、サイバーシステムにおいて収集した情報を蓄積及び解析、その後再びフィジカルシステムにアクチュエートするフィードバックループによりシステムを制御している。CPSにおける情報の収集は、4Gや5Gなどの移動通信システムの利用も考えられており、様々なアプリケーションや大量のデバイスが動作するCPSにおいてより効率的かつ必要なタイミングでのセルラーリソースの割当が求められる。しかし、現在のセルラーリソースの割当はフィジカルシステムからのリソース要求の変化に基づいて行われており、サイバーシステムによる情報解析とは独立して行われているため、必要なタイミングで必要なリソースが割り当てられるとは限らない。したがって、フィジカルシステムの振る舞いをサイバーシステムで解析した結果をもとに、必要なタイミングでリソースを割り当てるセルラーリソース制御が重要である。
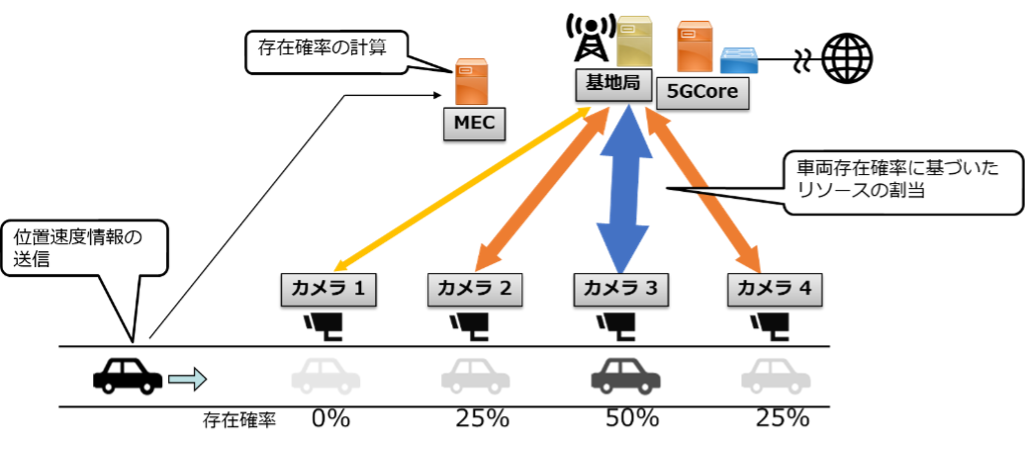
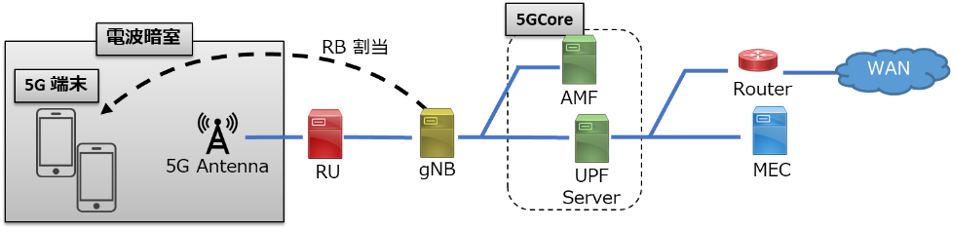
本研究では、道路等における監視カメラが走行車両の映像を基地局へ送信するCPSを想定し、5G端末と一体となったカメラが走行車両を捉えている間に多くのセルラーリソースを割り当てる手法を実現する。実装したCPSは、フィジカルシステムでは車両が走行し、サイバーシステムでは車両の位置速度情報の収集、車両位置予測を行う。ただし、現行の道路交通法では実車を用いた検証が困難であるため、ミニチュア車両を用いたCPSを構築している。また、セルラーリソース割当手法の実装にあたり、ソフトウェア無線機器を用いて5Gシステムを構築し、さらに車両位置予測結果に基づいたリソース割当が可能となるよう5Gシステムを拡張している。5Gシステムのリソースブロック数を245とし、ミニチュア車両を用いた実験によってセルラーリソース割当手法が割り当てるリソース量を評価した結果、車両の存在確率が0となるカメラに対して1スロットあたり平均7RB(Resource Block)を割り当てているのに対し、存在確率が高くなるカメラには存在確率最大時に1スロットあたり平均120RBのリソースを割り当てることを確認した。
[関連発表論文]
- 中村 樹, 荒川 伸一, 宮坂 拓也, 田上 敦士, 長谷川 剛, 村田 正幸, “5G通信技術を用いたC-V2Xにおけるセルラーリソース割当手法の実装と評価,” 電子情報通信学会技術研究報告, vol. 122, no. 310, NS2022-142, pp. 70-75, December 2022.
- 荒川 伸一, “ローカル5G運用は大学に何をもたらすのか~研究と運用で得られた可能性と課題~.” AXIES2022年次大会, December 2022.
4.2. 高信頼・低遅延通信(URLLC)実現のためのリソーススケジューリングに関する研究
3GPP Release 17での導入が見込まれるURLLC(Ultra-Reliable and Low Latency Communication; 超低遅延通信)におけるGrant Free(GF)スケジューリングの性能解析モデルを拡張し、電波信号の強度を考慮するパラメータを導入した。Grant Freeスケジューリングは、端末群に対して事前に共有セルラーリソースを割り当てておき、基地局による個々の端末への割当を待つことなくデータ通信を可能とする方式である。拡張した性能解析モデルによって、電波信号の強度の観測のもと、一定の送信成功確率を実現するために必要となる共有セルラーリソース量が算出されることを示した。
[関連発表論文]
- Suyong Eum, Shin'ichi Arakawa, and Masayuki Murata, “A probabilistic grant free scheduling model to allocate resources for extreme URLLC applications,” in Proceedings of 2022 IEEE Latin-American Con-ference on Communications (LATINCOM), November 2022.
- Suyong Eum, Shin'ichi Arakawa, and Masayuki Murata, “Probabilistic grant free scheduling for extreme URLLC (xURLLC) applications,” submitted for publication.
4.3. 小型5G移動基地局に関する研究
セルラーシステムの高度化に向け、小型の移動基地局を構築している。従来の基地局は固定的に設置するものとされている。移動型の基地局を構築できれば、情報および情報交換が必要な時・場所が限定される場合や固定型の基地局が設計時に前提としていた環境条件が変わって通信できない場合に移動基地局を展開するなど様々な活用形態が期待できる。しかし、現有の基地局設備は20kg以上の機材で動作しており市販の移動体には搭載不可能であることから、使用周波数帯域を限定し信号処理量を抑えることで基地局設備の小型化を図った。その結果、基地局設備は3kgとなり、市販の移動型ロボットへ搭載して10cmの精度で移動制御が可能であることを確認した。次に、小型移動基地局の利用例として、移動基地局が巡回しながら電波環境をセンシングし、複数の端末が信号品質を損なうことなく通信可能となる位置に移動基地局を移動させる移動制御手法を実機上で動作させた。電波シールド室を用いて移動制御手法を評価した結果、電波環境のセンシングを行うことにより、2台の端末における受信信号強度の合計が最大となる地点へ自律的に移動制御することが可能であることがわかった。
[関連発表論文]
- 挾間 敦久, “電波環境センシングを用いた小型5G移動基地局の移動制御手法の提案と評価,” 大阪大学基礎工学部情報科学科特別研究報告, February 2023.
4.4. B5G時代における車載光ネットワークに関する研究
コンピューティング能力の向上と機械学習技術の発展に伴い、自動運転技術が注目を集めている。レベル4以上の自律的な自動運転の実現のためには、車両に搭載される高精細カメラ、ミリ波レーダ、LiDARなどのセンサ群からの環境情報を瞬時に処理して車両走行にフィードバックする大容量・低遅延の車載ネットワークシステムの構築が不可欠である。
車載ネットワークは、エンジンなどの制御に用いるCAN(Controller Area Network)が一般的であったが、近年はネットワークの大容量化が進められ、1GbEイーサーネットの導入が始まり、さらには10GbEイーサーネットの標準化作業が進められている段階にある。しかし、電気PHYを用いるイーサーネットシステムは、EMC(Electro Magnetic Compatibility)により大容量化が困難であり、また光PHYを用いるイーサーネットシステムではレーザ光源の数量が多くなり、長期間の運用に課題が残される。そこで、慶應義塾大学、古河電気工業株式会社、株式会社メガチップス、東京大学とともに、少量のレーザーダイオードを用いた車載光ネットワークシステムの実現に取り組んでいる。
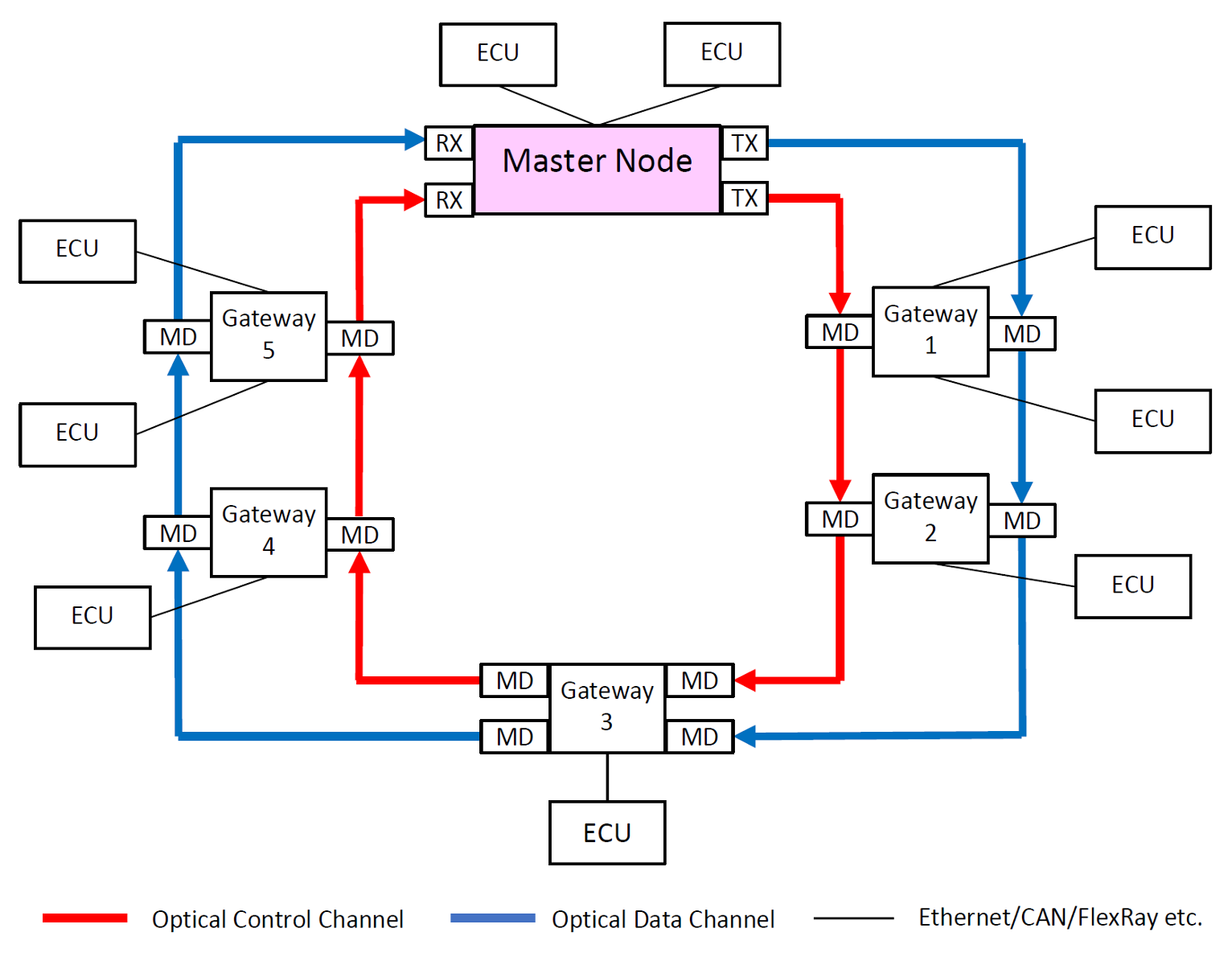
以下の論文では、光PHYを搭載するマスターノードと、光パッシブ素子から構成されるゲートウェイノードによるゾーン分割型車載光ネットワークに着目している。ゲートウェイノードは光源を持たないため、マスターノードがすべてのデータ送受信をスケジューリングした上で光信号を送信する必要がある。そこで、マスターノードとゲートウェイノード間のデータ送受信をなす通信方式として、スロット分割による時分割方式を基本とし、ゲートウェイからマスターノードへのデータ送信手順、マスターノードからゲートウェイノードへのデータ送信手順を定めた。さらに、各ゲートウェイへのスロット割当を事前トラヒック量にもとづいて静的に定める手法、ゲートウェイの送信待ちデータ量にもとづいて決定する動的割当手法、トラヒックの周期性にもとづく予測により割り当てる準動的割当手法を考案し、回線速度100Gbps, スロットサイズ9000バイト、ガードバンド100[ns]とした計算機シミュレーション評価を行った。その結果、準動的割当手法のレイテンシが最も小さく、約84Gbpsのトラヒックを2.1[μs]~3[μs]のレイテンシで収容可能であることがわかった。
次に、開発している少量のレーザーダイオードを用いた車載光ネットワークシステムと、車載システム向けポイントツーポイント光通信規格IEEE P802.3cz(OMEGA)ベースの車載光ネットワークの信頼性を比較評価した。DFB型レーザーダイオードならびにVCSEL型レーザーダイオードの信頼性レポートで示された故障率に基づいてシステム寿命を算出した結果、OMEGAベースの車載光ネットワークの場合1年未満となるのに対し、少量のレーザーダイオードを用いた車載光ネットワークシステムの場合約80年が達成可能である見通しを得た。
[関連発表論文]
- Hiroyuki Tsuda, Ryogo Kubo, Tatsuo Furuya, Masayuki Iwase, Masahito Morimoto, Hisashi Kondo, Yasushi Amamiya, Yoshiaki Nakano, Takuo Tanemura, Masayuki Murata, Shin'ichi Arakawa, Naokatsu Yamamoto, Atsushi Matsumoto, and Ryo Takahashi, “Proof of principle experiment on Si-Photonics-Based In-Vehicle Optical Network (SiPhON),” submitted for presentation.
- Hiroyuki Tsuda, Ryogo Kubo, Tatsuo Furuya, Masayuki Iwase, Masahito Morimoto, Hisashi Kondo, Yasushi Amamiya, Yoshiaki Nakano, Takuo Tanemura, Masayuki Murata, Shin'ichi Arakawa, Naokatsu Yamamoto, Atsushi Matsumoto, and Ryo Takahashi, “Proposal for a highly reliable in-vehicle optical network: SiPhON (Si-Photonics-Based In-Vehicle Optical Network),” in Proceedings of 27th OptoElectronics and Commu-nications Conference/International Conference on Photonics in Switching and Computing, July 2022.
- Onur Alparslan, Shin'ichi Arakawa, and Masayuki Murata, “A zone-based optical intra-vehicle backbone network architecture with dynamic slot scheduling,” submitted for publication.
- 荒川 伸一, 村田 正幸, “車載光ネットワークSiPhONのレーザーダイオード故障に対する信頼性評価,” 電子情報通信学会 技術研究報告 (PN2022-65), pp. 125-129, March 2023.
- Shin'ichi Arakawa and Masayuki Murata, “Reliability analysis of Si-Photonics-Based In-Vehicle Optical Network (SiPhON),” submitted for presentation.