5. 次世代エッジコンピューティングに関する研究
5.1. マイクロデータセンターにおけるリソース分離型アーキテクチャに関する研究
5.1.1. マイクロデータセンターにおけるリソース分離型アーキテクチャに関する研究
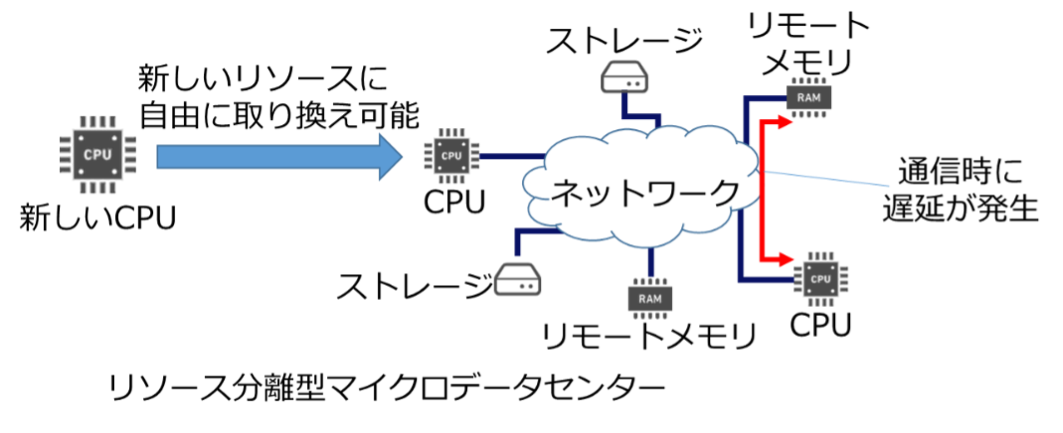
近年、リアルタイム性の高い処理の実行のために、ユーザにより近いエッジに配置可能な比較的小規模のデータセンターであるマイクロデータセンターが提案されている。マイクロデータセンターは、大規模なデータセンターと比べて保有する資源量は限られているため、無駄のない資源利用が重要となる。そこで、CPUやメモリ等の資源同士を独立させ、ネットワークでつないだリソース分離型マイクロデータセンターが提案されている。リソース分離型マイクロデータセンターでは、資源割り当てがアプリケーションの実行性能に大きな影響を持ち、割り当て方によって、十分な資源が存在する場合でもそれらをつなぐネットワーク資源が枯渇してしまう恐れがある。そこで、本研究では、各資源の重要性に基づいた割り当てコストをもとに資源を割り当てることで、将来のアプリケーションの収容に必要となる資源の利用を回避し、必要な時に必要な資源をアプリケーションに対して割り当てることを実現する手法について提案し、シミュレーション評価により、提案した手法が短時間での処理を求められるようなアプリケーションに対しても適切な資源を割り当てることができることを示している。また、このような各アプリケーションに対する動的な資源割当に適したマイクロデータセンター内のネットワーク構成についても検討を進めている。
[関連発表論文]
- Akishige Ikoma, Yuichi Ohsita, and Masayuki Murata, “Disaggregated micro data center: Resource allocation considering impact of network on performance,” in Proceedings of 2023 IEEE 20th Consumer Communi-cations & Networking Conference (CCNC 2023), pp. 360-365, 8-11 January 2023.
- Masashi Sorimachi, “Network structure for micro disaggregated data centers to accommodate many applica-tions,” Master's thesis, Graduate School of Information Science and Technology, Osaka University, February 2023.
- Akishige Ikoma, Yuichi Ohsita, and Masayuki Murata, “Resource allocation considering impact of network on performance in a disaggregated micro data center,” submitted for publication.
- 大下 裕一, 吉川 隆士, 村田 正幸, “データセンターにおけるコンピューティング技術とそれを支えるネットワーク技術の動向,” 電子情報通信学会会誌, vol. 106, no. 2, pp. 114-120, February 2023.
- 反町 将, 生駒 昭繁, 大下 裕一, 村田 正幸, “リソース分離型マイクロデータセンターのネットワーク構成,” 電子情報通信学会 技術研究報告 (IN2022-29), vol. 122, no. 171, pp. 13-18, September 2022.
5.2. 脳の情報処理機構の拡張による端末-エッジ-クラウド連携制御
5.2.1. 脳の情報処理機構の拡張による端末-エッジ-クラウド連携制御(一部、NECブレイン・インスパイヤード・コンピューティング協働研究所における成果)(1.3.1項再掲)
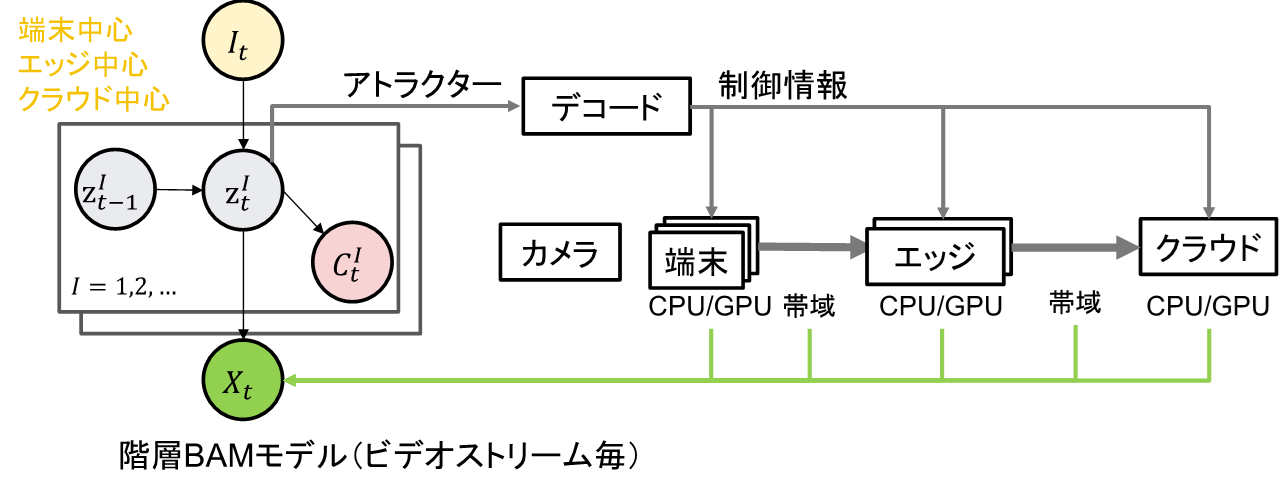
近年、エッジコンピューティングに対応したアプリケーションが注目されている。AI蒸留を始めとしてモデルサイズの軽減技術により、従来のクラウドで提供されるAIよりも低い遅延で、計算能力の限られたエッジや端末上にコンパクトなAIモデルを配置することができる。しかし、一般的にモデルが小さいAIは精度が低いため、処理割り当てを決める際には、精度と遅延のトレードオフ、さらに消費電力を考慮する必要がある。このようなタスク割り当て問題では、計算の困難さからヒューリスティックな解法が必要であるが、環境が準静的な場合、最適解から乖離が問題となる。我々の研究グループでは、準静的環境では最適解を連続的に探索し、動的な環境変化に対しては過去の準静的環境との類似性に基づいて準最適解を即座に決定するというアプローチをとっている。特に、類似性に基づく準最適解の選択には、脳の意思決定をモデル化したベイズアトラクターモデル(BAM)を拡張して用いることが有用となる。本研究では、人間の意思決定において、関連する概念や操作がチャンクにまとめられ、階層的に整理されることに着想を得て、BAMを階層的モデルに拡張する。これにより、選択肢の数が増えても、高い正答率を維持できることを示した。また、類似の結果をもたらす選択肢が多い場合に高速に選択を行うmagnitude-sensitivityを示すモデルへの拡張も行なっており、複数端末の素早い協調的タイムスロット割り当てが可能となることを示した。
[関連発表論文]
- Tatsuya Otoshi, Masayuki Murata, Hideyuki Shimonishi, Tetsuya Shimokawa, “Hierarchical Bayesian at-tractor model for dynamic task allocation in edge-cloud computing,” in Proceedings of International Con-ference on Computing, Networking and Communications (ICNC 2023), (Honolulu), February 2023.
- Tatsuya Otoshi, Masayuki Murata, Hideyuki Shimonishi, and Tetsuya Shimokawa, “Distributed timeslot allocation in mMTC network by magnitude-sensitive Bayesian attractor model,” submitted for presentation.
5.2.2. ロボット制御のための時空間確率モデルによる実世界予測と制御に関する研究(一部、NEC B5G協働研究所の成果)(2.1.2項再掲)
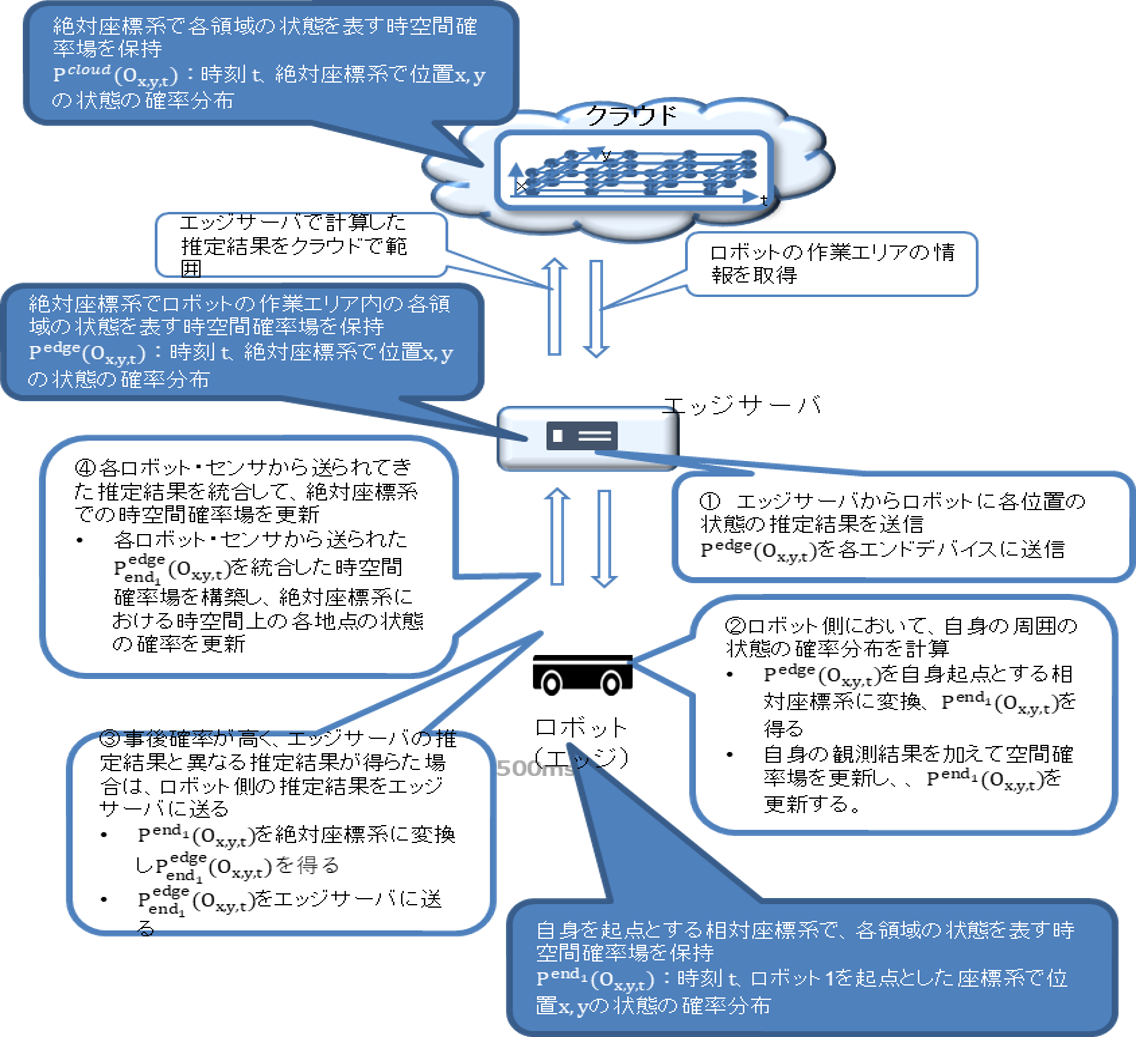
移動ロボットは障害物との衝突を避けながら、要求されたタスクを行うような制御をする必要がある。しかしながら、移動ロボットの作業領域内には、他のロボットや人といた移動する障害物も存在する。そのような障害物との衝突をさけつつ、効率的な制御を行うためには、各時刻の障害物の位置を予測することが重要である。
ただし、将来の障害物の位置は、正確に予測できるとは限らない。そのため、我々は、将来の障害物の位置を、確率として把握し、それにより、障害物が存在する時空間上の領域を避けるような移動ロボットの制御を実現することを目指している。本研究では、時空間上の各点の障害物の有無の関係を、条件付確率場としてモデル化を行い、逐次、新たに領域内をセンシングして得られた情報をもとに、モデルの更新を行うことにより、時空間上の各領域の障害物が存在する確率を予測する手法について提案し、ロボット制御に用いることにより、その有効性の確認を進めている。また、ロボットの制御に活用するためには、時々刻々の状況の変化をリアルタイムに反映した、精度のよい予測が必要となる。このため、我々は、時空間の障害物の予測モデルをエッジ・クラウドで連携して更新することにより、リアルタイムに観測情報を反映した予測を行う手法の検討を進めている。
[関連発表論文]
- Yuichi Ohsita, Shinya Yasuda, Taichi Kumagai, Hiroshi Yoshida, Dai Kanetomo, and Masayuki Murata, “Spatio-temporal model that aggregates information from sensors to estimate and predict states of obstacles for control of moving robots,” in Proceedings of International Conference on Emerging Technologies for Communications, December 2022.
- Kazuki Kimura, “Real-time obstacle prediction utilizing edge-cloud cooperation in mobile robot control,” Master's thesis, Graduate School of Information Science and Technology, Osaka University, February 2023.
5.3. エッジコンピューティング技術を活用したセルラーV2Xに関する研究
5.3.1. エッジコンピューティング技術を活用したセルラーV2Xにおける衝突検知手法に関する研究(一部、KDDI総合研究所との共同研究)(4.1.1項再掲)
エッジコンピューティングのユースの検討が国内外で進められている。その1つとして、車両や歩行者から局所的に得られる環境情報をデータセンターで収集・解析し、車両群へ安全性に関する情報をフィードバックすることで安全性を高めるITS(Intelligent Transport Systems)アプリケーションへの期待が高まっている。見通しの悪い交差点における衝突検知など、ITSアプリケーションの高度化のためには、車両の自律的な認知機能に加え、車両間で情報共有する機能や各車両で得られる情報を分析して活用する機能が不可欠である。そのため、セルラーシステムを介して車両環境情報をエッジサーバー上に収集して解析し、車両に解析結果をフィードバックするC-V2Xシステムが注目されている。しかし、例えば交差点における車両同士の衝突を検知する既存手法の多くは、車両位置の線形予測に基づく位置推定手法にもとづいており、車両の加減速による位置のばらつきが考慮されていない。
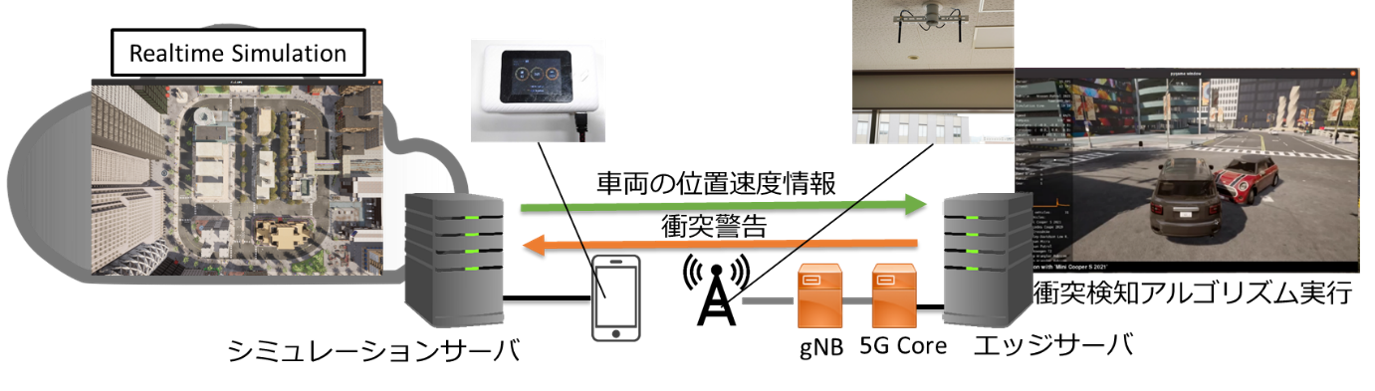
本研究では、車両位置を確定的に算出し利用するのではなく、車両の確率的挙動にもとづいて車両位置を確率的に算出し、衝突の可能性を確率的かつ定量的に捉える衝突検知手法を提案している。提案手法は、車両環境情報受信以前の位置確率分布算出に用いた計算結果を利用し新しく得られる位置速度情報との予測誤差を用いて逐次補正する衝突検知手法である。大阪大学情報科学科に設置したローカル5G環境とエッジサーバーを用いて衝突検知システムを構築し、さらに交通シミュレータCARLAによる実時間シミュレーションと連動させることによって交差点進入時の衝突検知性能を評価した。その結果、逐次補正を用いない既存手法では通知すべき衝突リスクの80%が進入時までに通知されないことがわかった。一方、提案手法では、すべての衝突リスクが通知されることが明らかとなった。
[関連発表論文]
- Ryu Yachikojima, Shin'ichi Arakawa, Takeshi Kitahara, Nagao Ogino, Go Hasegawa, and Masayuki Murata, “Low-latency probabilistic collision detection method for C-V2X applications,” in Proceedings of 7th In-ternational Commercial Vehicle Technology Symposium, (Kaiserslautern), September 2022.
- 中村 樹, 荒川 伸一, 宮坂 拓也, 田上 敦士, 長谷川 剛, 村田 正幸, “5G通信技術を用いたC-V2Xにおけるセルラーリソース割当手法の実装と評価,” 電子情報通信学会技術研究報告, vol. 122, no. 310, NS2022-142, pp. 70-75, December 2022.
5.3.2. セルラーV2Xのためのリソース割当手法に関する研究(一部、KDDI総合研究所との共同研究)(4.1.2項再掲)
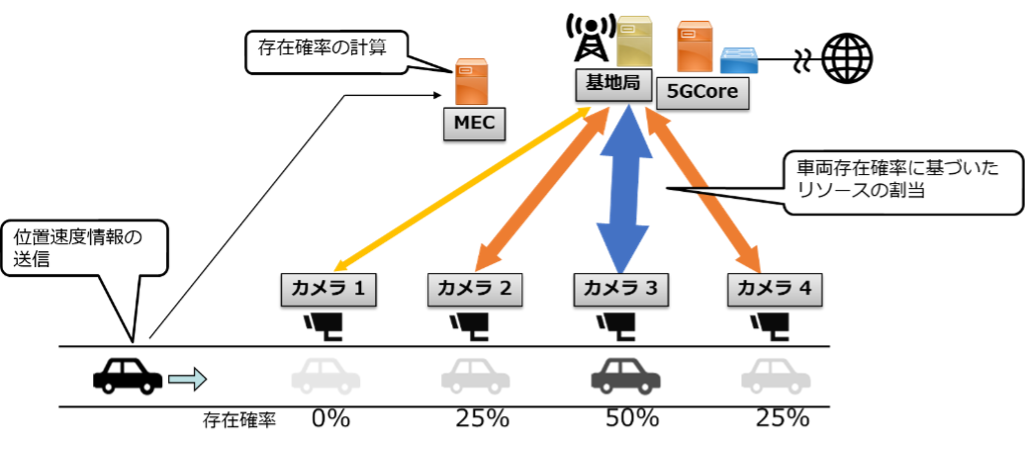
近年の組込みシステム技術や通信技術の進歩に伴い、CPS(Cyber-Physical System:サイバーフィジカルシステム)の実用化が進んでいる。CPSでは、フィジカルシステムにおいてセンシングを行い、サイバーシステムにおいて収集した情報を蓄積及び解析、その後再びフィジカルシステムにアクチュエートするフィードバックループによりシステムを制御している。CPSにおける情報の収集は、4Gや5Gなどの移動通信システムの利用も考えられており、様々なアプリケーションや大量のデバイスが動作するCPSにおいてより効率的かつ必要なタイミングでのセルラーリソースの割当が求められる。しかし、現在のセルラーリソースの割当はフィジカルシステムからのリソース要求の変化に基づいて行われており、サイバーシステムによる情報解析とは独立して行われているため、必要なタイミングで必要なリソースが割り当てられるとは限らない。したがって、フィジカルシステムの振る舞いをサイバーシステムで解析した結果をもとに、必要なタイミングでリソースを割り当てるセルラーリソース制御が重要である。
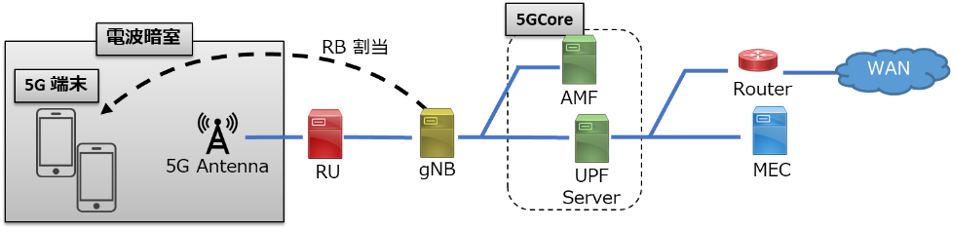
本研究では、道路等における監視カメラが走行車両の映像を基地局へ送信するCPSを想定し、5G端末と一体となったカメラが走行車両を捉えている間に多くのセルラーリソースを割り当てる手法を実現する。実装したCPSは、フィジカルシステムでは車両が走行し、サイバーシステムでは車両の位置速度情報の収集、車両位置予測を行う。ただし、現行の道路交通法では実車を用いた検証が困難であるため、ミニチュア車両を用いたCPSを構築している。また、セルラーリソース割当手法の実装にあたり、ソフトウェア無線機器を用いて5Gシステムを構築し、さらに車両位置予測結果に基づいたリソース割当が可能となるよう5Gシステムを拡張している。5Gシステムのリソースブロック数を245とし、ミニチュア車両を用いた実験によってセルラーリソース割当手法が割り当てるリソース量を評価した結果、車両の存在確率が0となるカメラに対して1スロットあたり平均7RB(Resource Block)を割り当てているのに対し、存在確率が高くなるカメラには存在確率最大時に1スロットあたり平均120RBのリソースを割り当てることを確認した。
[関連発表論文]
- 中村 樹, 荒川 伸一, 宮坂 拓也, 田上 敦士, 長谷川 剛, 村田 正幸, “5G通信技術を用いたC-V2Xにおけるセルラーリソース割当手法の実装と評価,” 電子情報通信学会技術研究報告, vol. 122, no. 310, NS2022-142, pp. 70-75, December 2022.
- 荒川 伸一, “ローカル5G運用は大学に何をもたらすのか~研究と運用で得られた可能性と課題~.” AXIES2022年次大会, December 2022.