4. 次世代移動体通信ネットワーク (Beyond 5G/6G) に関する研究
4.1. セルラーV2Xのための移動体通信サービスに関する研究
4.1.1. エッジコンピューティング技術を活用したセルラーV2Xにおける衝突検知手法に関する研究(一部、KDDI総合研究所との共同研究)
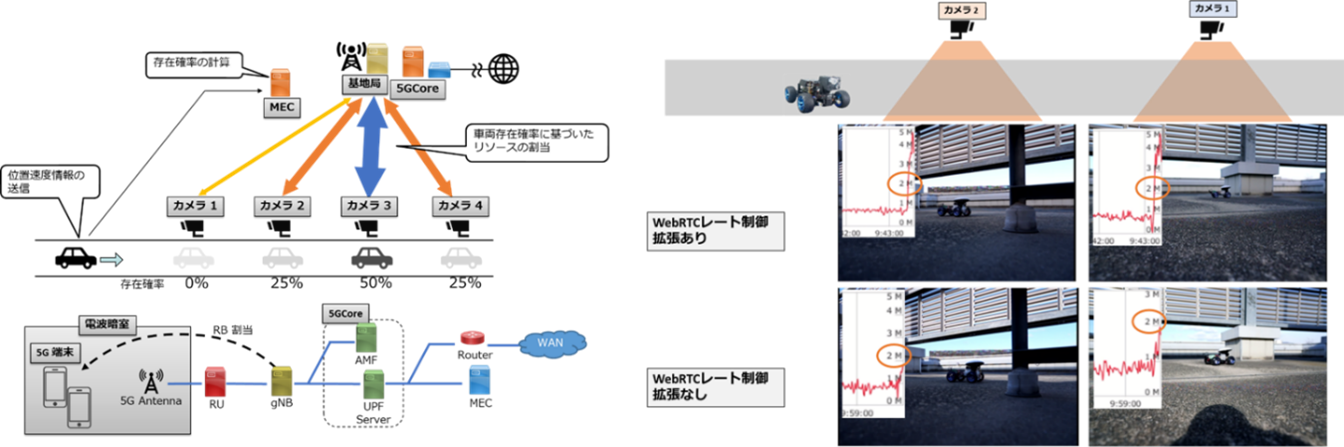
近年の組込みシステム技術や通信技術の進歩に伴い、CPS (Cyber-Physical System: サイバーフィジカルシステム) の実用化が進んでいる。CPSでは、フィジカルシステムにおいてセンシングを行い、サイバーシステムにおいて収集した情報を蓄積及び解析、その後再びフィジカルシステムにアクチュエートするフィードバックループによりシステムを制御している。CPS における情報の収集は、4Gや5Gなどの移動通信システムの利用も考えられており、様々なアプリケーションや大量のデバイスが動作するCPSにおいてより効率的かつ必要なタイミングでのセルラーリソースの割当が求められる。しかし、現在のセルラーリソースの割当はフィジカルシステムからのリソース要求の変化に基づいて行われており、サイバーシステムによる情報解析とは独立して行われているため、必要なタイミングで必要なリソースが割り当てられるとは限らない。したがって、フィジカルシステムの振る舞いをサイバーシステムで解析した結果をもとに、必要なタイミングでリソースを割り当てるセルラーリソース制御が重要である。
本研究では、道路等における監視カメラが走行車両の映像を基地局へ送信するCPSを想定し、5G端末と一体となったカメラが走行車両を捉えている間に多くのセルラーリソースを割り当てる手法を実現する。実装したCPSは、フィジカルシステムでは車両が走行し、サイバーシステムでは車両の位置速度情報の収集、車両位置予測を行う。ただし、現行の道路交通法では実車を用いた検証が困難であるため、ミニチュア車両を用いたCPSを構築している。また、セルラーリソース割当手法の実装にあたり、ソフトウェア無線機器を用いて5Gシステムを構築し、さらに車両位置予測結果に基づいたリソース割当が可能となるよう5Gシステムを拡張している。拡張した5Gシステムと、ミニチュア車両を用いた実験によってセルラーリソース割当手法が割り当てるリソース量を評価した結果、車両の存在確率が 0 となるカメラに対して 1 スロットあたり平均 7 RB (Resource Block) を割り当てているのに対し、存在確率が高くなるカメラには存在確率最大時に 1 スロットあたり平均 120 RB のリソースを割り当てることを確認した。ただし、5Gシステムでリソースを割り当てたとしても、アプリケーション層がそのリソースを利用できるとは限らない。そこで、WebRTCを用いた映像ストリーミングのレート制御手法を拡張し、アプリケーションにおける高速かつ動的なレート制御を実装した。
車両位置予測に基づいたリソース制御及び 帯域に応じたレート制御を実装したストリーミング実験を行った結果、車両がカメラに映っているタイミングで、割り当てられるリソースが 1 フレーム当たり 13 から 53 RBに増加し、ストリーミングのビットレートが 1 から 4Mbps まで上昇した。また、それに伴い、解像度は 2560x1440 から 3840x2160 に、フレームレートは 30 から 40FPS に上昇しており、ストリーミングの品質が向上した。さらに、常に高品質でストリーミングする場合と比較して、カメラの台数に応じて最大 80\% のリソースが節約できることが示された。
[関連発表論文]
- Itsuki Nakamura, “Implementation and evaluation of a cellular resource allocation method based on prediction of physical system behavior in Cyber-physical systems,” Master’s thesis, Graduate School of Information Science and Technology, Osaka University, February 2024.
4.1.2. 5G 通信技術を用いたVRアプリケーションの体感品質に関する研究
5G 環境による低遅延通信が期待される一方で、5G 環境では各端末に割り当てられるリソースが限られていることから、適切な量のリソースを必要な端末に対して割り当てることが必要となる。以下の研究では、低遅延化が期待されるアプリケーションとしてVR(Virtual Reality)アプリケーションに着目し、その中でもVR 空間でのインタラクションを含むアプリケーションにおいて、通信の遅延と遅延のばらつきがユーザーの体感品質にどの程度影響を与えるかを明らかにしている。免許を取得し運用している5G環境とWiFi環境において、MOS値によるVRの体感品質評価を行った結果、WiFi環境ではトラヒック増加に伴って遅延のばらつきが増大するため体感品質が低下すること、および、5G環境では遅延のばらつきが抑えられ体感品質が向上することがわかった。具体的には、遅延のばらつきはインタラクションの相手に付随するVRオブジェクトの位置誤差に表出し、体感品質に大きく寄与することが明らかとなった。これらの結果から、セルラーリソースが限られている場合には、遅延のばらつきを抑制するリソース割当が重要であることがわかった。
[関連発表論文]
- Tomoki Akasaka, Shin’ichi Arakawa & Masayuki Murata, “On the service quality of cooperative VR Applications in 5G cellular networks,” in Proceedings of 30th European Conference on Software Process Improvement (EuroSPI 2023), August 2023.
- Tomoki Akasaka, “A study on quality of experience focusing on information synchronization in cooperative VR applications utilizing 5G cellular networks,” Master’s thesis, Graduate School of Information Science and Technology, Osaka University, February 2024.
4.2. B5G時代に向けたセルラーシステムの高度化に関する研究
4.2.1. 5G 通信技術のための小型移動基地局の実現に関する研究
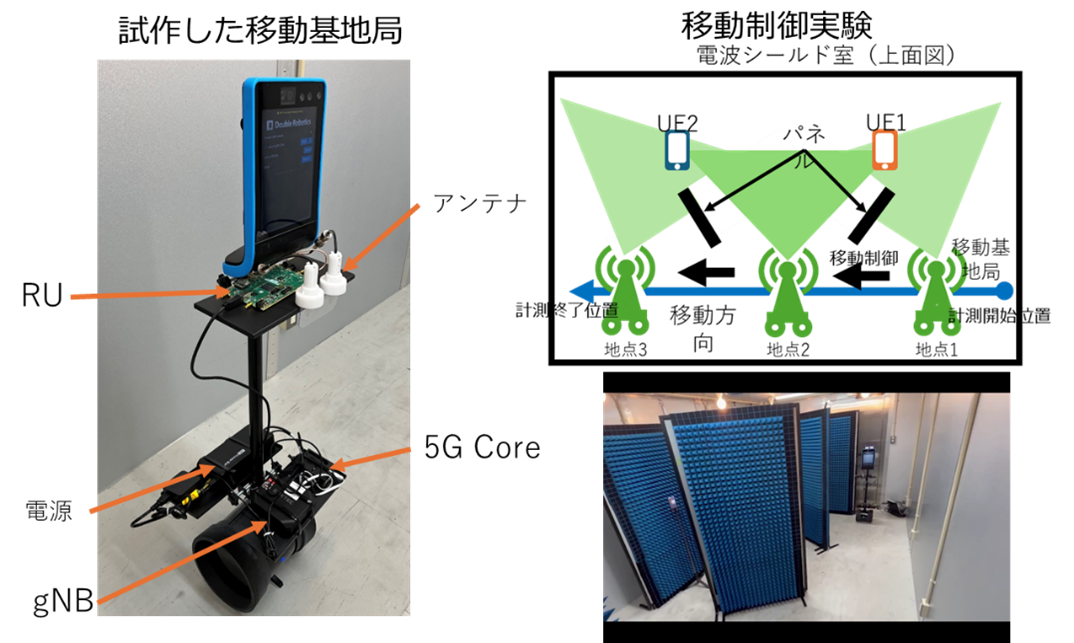
近年の通信技術の発展に伴い、様々な分野で5G 移動体通信システムの利用が検討されているが、これらの取り組みでは、基地局を固定的に設置し、基地局から発する電波が届く範囲で通信端末が動くものとなっている。その一方で、移動型の基地局(以降、単に移動基地局と書く)を構築できれば、移動基地局を展開することで様々な活用形態が期待できる。
以下の論文では、まず5G 通信技術を用いた小型の移動基地局を構築した。現有の基地局設備は20kg以上の機材で動作しており市販の移動体には搭載不可能であることから、使用周波数帯域を限定し信号処理量を抑えることで基地局設備の小型化を図った。その結果、基地局設備は3kg となり、市販の移動型ロボットへ搭載して誤差5cm 以内の精度で移動制御が可能であることを確認した。次に、小型移動基地局の利用例として、移動基地局が巡回しながら電波環境をセンシングし、複数の端末が信号品質を損なうことなく通信可能となる位置に移動基地局を移動させる移動制御手法を実機上で動作させた。電波シールド室を用いて移動制御手法を評価した結果、電波環境のセンシングを行うことにより移動基地局を自律的に移動制御し、2 台の端末の通信品質が改善されることが確認された。
[関連発表論文]
- 挾間 敦久, 荒川 伸一, 村田 正幸, “電波環境センシングを用いた小型 5G 移動基地局の移動制御手法,” 電子情報通信学会 ネットワークシステム研究会, October 2023.
4.3. B5G時代における車載光ネットワークに関する研究
4.3.1. 車載光ネットワークに関する研究
コンピューティング能力の向上と機械学習技術の発展に伴い、自動運転技術が注目を集めている。レベル4以上の自律的な自動運転の実現のためには、車両に搭載される高精細カメラ、ミリ波レーダ、LiDARなどのセンサ群からの環境情報を瞬時に処理して車両走行にフィードバックする大容量・低遅延の車載ネットワークシステムの構築が不可欠である。
車載ネットワークは、エンジンなどの制御に用いるCAN(Controller Area Network)が一般的であったが、近年はネットワークの大容量化が進められ、1GbEイーサーネットの導入が始まり、さらには10GbEイーサーネットの標準化作業が進められている段階にある。しかし、電気PHYを用いるイーサーネットシステムは、EMC(Electro Magnetic Compatibility)により大容量化が困難であり、また光PHYを用いるイーサーネットシステムではレーザ光源の数量が多くなり、長期間の運用に課題が残される。そこで、慶應義塾大学、古河電気工業株式会社、株式会社メガチップス、東京大学とともに、少量のレーザーダイオードを用いた車載光ネットワークシステムの実現に取り組んでいる。
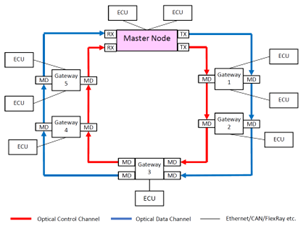
以下の論文では、光PHYを搭載するマスターノードと、光パッシブ素子から構成されるゲートウェイノードによるゾーン分割型車載光ネットワークに着目している。ゲートウェイノードは光源を持たないため、マスターノードがすべてのデータ送受信をスケジューリングした上で光信号を送信する必要がある。そこで、マスターノードとゲートウェイノード間のデータ送受信をなす通信方式として、スロット分割による時分割方式を基本とし、ゲートウェイからマスターノードへのデータ送信手順、マスターノードからゲートウェイノードへのデータ送信手順を定めた。さらに、各ゲートウェイへのスロット割当を事前トラヒック量にもとづいて静的に定める手法、ゲートウェイの送信待ちデータ量にもとづいて決定する動的割当手法、トラヒックの周期性にもとづく予測により割り当てる準動的割当手法を考案し、回線速度100Gbps, スロットサイズ9000バイト、ガードバンド 100 [ns]とした計算機シミュレーション評価を行った。その結果、準動的割当手法のレイテンシーが最も小さく、約84Gbpsのトラヒックを2.1[μs]~3 [μs]のレイテンシーで収容可能であることがわかった。
次に、開発している少量のレーザーダイオードを用いた車載光ネットワークシステムと、車載システム向けポイントツーポイント光通信規格IEEE P802.3cz(OMEGA)ベースの車載光ネットワークの信頼性を比較評価した。DFB型レーザーダイオードならびにVCSEL型レーザーダイオードの信頼性レポートで示された故障率に基づいてシステム寿命を算出した結果、OMEGA)ベースの車載光ネットワークの場合1年未満となるのに対し、少量のレーザーダイオードを用いた車載光ネットワークシステムの場合約80年が達成可能である見通しを得た。
[関連発表論文]
- Onur Alparslan, Shin’ichi Arakawa and Masayuki Murata, “A zone-based optical intra-vehicle back-bone network architecture with dynamic slot scheduling,” Optical Switching and Networking, vol. 50, p. 100753, August 2023.
- Shin’ichi Arakawa and Masayuki Murata, “Reliability analysis of Si-Photonics-Based In-Vehicle Optical Network (SiPhON),” in Proceedings of XXXVth URSI General Assembly and Scientific Symposium (URSI GASS 2023), November 2023.
- Hiroyuki Tsuda, Ryogo Kubo, Tatsuo Furuya, Yutaka Hoshiyama, Masayuki Iwase, Masahito Morimoto, Yasushi Amamiya, Yongwi Kim, Yoshiaki Nakano, Takuo Tanemura, Masayuki Murata, Shinichi Arakawa, Naokatsu Yamamoto, Atsushi Matsumoto and Ryo Takahashi, “Proof of principle experiment on Si-photonics-based in-vehicle optical network (SiPhON),” in Proceedings of the XXXVth URSI General Assembly and Scientific Symposium, URSI GASS 2023, November 2023.
- 荒川 伸一,津田 裕之, “大容量車載光ネットワークSiPhONの研究開発,” 電子情報通信学会 技術研究報告 (CS2023-5), 特別招待講演, pp. 20–25, May 2023.
- Hao Su, Shin’ichi Arakawa, and Masayuki Murata, “3D multi-object tracking based on two-stage data association for collaborative perception scenarios,” in Proceedings of 2023 IEEE Intelligent Vehicles Symposium (IEEE IV 2023), pp. 1–7, June 2023.
- Hao Su, Shin’ichi Arakawa, and Masayuki Murata, “Cooperative 3D multi-object tracking with cross-agent data association for connected and automated vehicles,” submitted for publication.
4.4. 6G向け統合センシング・通信システム (ISAC: Integrated Sensing and Communication) に関する研究
4.4.1. 能動推論を用いた観測・制御ループ統合型ビームフォーミング制御に関する研究【2.1.3項再掲】
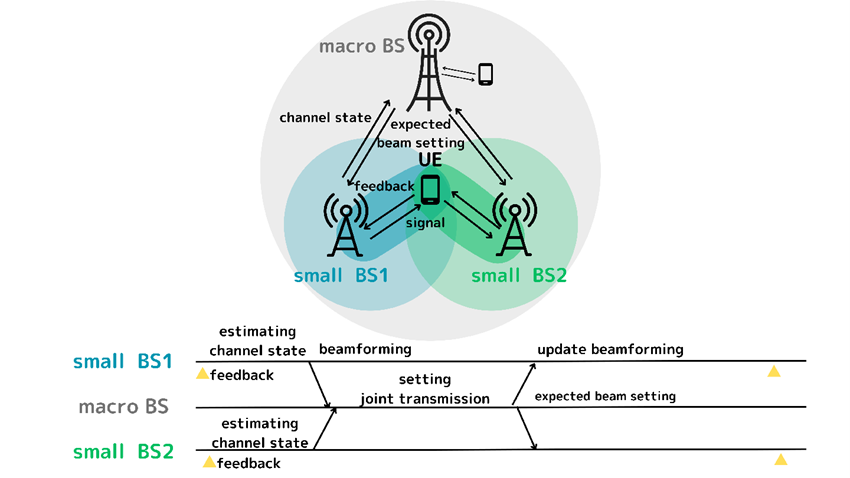
近年、電波による無線通信とセンシングを統合的に制御するIntegrated Sensing and Communication (ISAC)が注目されている。ISACでは同一周波数・同一ハードウェアを用いてセンシングと通信を同時に行う。従来のISACでは、センシングのアプリケーションと通信のアプリケーションは異なるものと想定されている。本研究では、センシング情報を通信におけるビームフォーミング制御に活用することで、センシングと統合されたビームフォーミング制御の実現を目指している。この統合のためには、常に変動する電波環境の中で、センシングによって環境の情報を正確に把握することによる間接的な制御性能の利得と、センシングのリソースを通信側に割くことによる直接的な制御性能の利得の双方を考慮した意思決定が必要となる。人の意思決定においても、状況を正確に知るための行動を行いながら行動の決定が行われるという能動推論が常に行われている。我々は、脳の能動推論との類似性に着目し、能動推論を応用することで、センシングと統合されたビームフォーミング制御を提案している。本研究では、受信電波強度のフィードバックをセンシング情報として、送信側でビームを能動推論により選択することで、環境変動に追随してビーム選択が可能であることを示した。また、受信電波の到達時間、反射電波の到達時間を用いた端末の位置推定をセンシング情報に加えたビームフォーミング制御への拡張も行なっており、位置情報を利用することでよりスループットの高いビーム制御が可能であることを示した。
[関連発表論文]
- Tatsuya Otoshi and Masayuki Murata, “Coordinated multi-point by hierarchical active inference with position and CSI feedback,” submitted for presentation, March 2024.
- Tatsuya Otoshi and Masayuki Murata, “Beamforming with free energy principle under hierarchical codebook,” in Proceedings of International Conference on Computing, Networking and Communications (ICNC 2024), (United States), February 2024.
- Tatsuya Otoshi and Masayuki Murata, “Distributed beamforming by multi-agent active inference,” in Proceedings of International Conference on Computing, Networking and Communications (ICNC 2024), (United States), February 2024.
- Tatsuya Otoshi and Masayuki Murata and Hideyuki Shimonishi and Tetsuya Shimokawa, “Distributed timeslot allocation in mMTC network by magnitude-sensitive Bayesian attractor model,” in Proceedings of IEEE 9th International Conference on Network Softwarization (IEEE NetSoft 2023), June 2023.
- 大歳 達也, 村田 正幸, “位置と伝搬チャネルの能動的推論による基地局間協調送受信,” 電子情報通信学会 技術研究報告 (RCS2023-238), vol. 123, no. 340, pp. 181–186, January 2024.