2) 情報環境ネットワークアーキテクチャに関する研究
2.1 センサネットワークアーキテクチャに関する研究
無線技術の進歩に伴い,小型で安価なセンサノードで構成される大規模なセンサネットワークが実用化され,その適用範囲が広がりつつある.無 線通信環境は,有線と比較してパケット損失率が高く品質も不安定である.また,センサノードの移動や故障に伴うネットワーク構成の変化も頻 繁に起こると考えられる.このようなセンサネットワークにおいて,すべてのセンサノードから情報を収集し,また制御情報を配信するような集 中型の制御は適していない.また,集中型の制御には,多数のセンサノードに起因するスケーラビリティの問題もある.そこで,本研究では,セ ンサネットワークにおける自律分散型の制御方法に関して,その性能を明らかにすることを主なテーマとしている.
2.1.1 パルス結合振動子モデルにもとづくセンサネットワーク通信機構
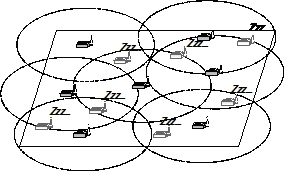
センサネットワークにおける情報収集・拡散においては,メッセージ送受信のタイミングをセンサ端末間で調整することにより,センサ情報集約 による消費電力削減,長期間のスリープによる長寿命化を図ることができる.一方,多数のセンサ端末が無作為に配置され,さらにセンサ端末の 追加,除去,移動が発生することから,センサネットワークの制御手法は自律分散型で自己組織的であることが求められる.
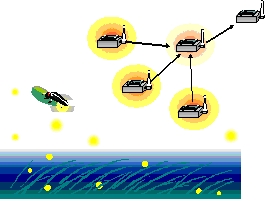
そこで,本研究においては,センサ端末による自律的なタイミング調整により,センサネットワーク全体として適切な周期,タイミングでセン サ情報がやりとりされるよう,蛍やコオロギなどに見られる相互干渉による同期メカニズムをモデル化した,パルス結合振動子モデルを応用して いる.パルス結合振動子モデルでは,パラメータや位相応答曲線(PRC: Phase Response Curve)の設定によって全振動子の完全同期や,振動子 がある位相差を保って発火する進行波を実現することができる.本研究では,任意の初期状態からアプリケーションの望む通信パターンを生成す る機構を提案している.シミュレーションにより,提案手法を用いることで単数・複数のセンサ端末を中心とした,情報拡散・情報収集の通信パ ターンを自律的に生成できることを示した.
[関連発表論文]
- Naoki Wakamiya, "Research works on sensor networking technologies," Jeju International Ubiquitous Com-puting Conference 2006 (invited talk), pp. 173-176, April 2006. [ppt]
- Yoshiaki Taniguchi, Naoki Wakamiya and Masayuki Murata, "A self-organizing communication mechanism using traveling wave phenomena for wireless sensor networks," to be presented at Second International Work-shop on Ad Hoc, Sensor and P2P Networks (AHSP2007), March 2007.
- 谷口義明, 若宮直紀, 村田正幸, "パルス結合振動子モデルにおける進行波状態を応用したセンサネットワー クのための自己組織型通信機構," 電子情報通信学会技術研究報告(NS2006-48), pp. 17-20, July 2006. [pdf] [ppt]
2.1.2 クラスタ型センサ情報収集機構
センサ情報収集の電力消費を抑えるためには,クラスタ型のネットワークを構成するのが効果的である.クラス タ型通信においては,近隣のセンサ端末でクラスタを形成し,クラスタ内のあるセンサ端末(クラスタヘッド) にセンサ情報を集約し,クラスタヘッドが基地局にセンサ情報を送信する.さらに,クラスタヘッドを交代制に することにより,センサ端末間で電力消費を均一化する.
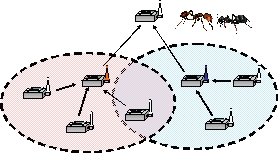
本研究では,局所的な情報のやりとりを通じたセンサ端末の自律的な判断により,残余電力を考慮した効率の よいクラスタを形成するクラスタリング手法を提案している.提案手法は,蟻の敵味方判別の仕組みを応用した クラスタリング手法であるANTCLUSTに基づいている.蟻は,遭遇した他の蟻と化学物質を交換することによりそ の所属する巣を推定し,敵か味方かを判別する.提案手法では,いったんクラスタが形成された後,一部のセン サ端末が所属するクラスタの情報をブロードキャストする.周囲のセンサ端末は他のクラスタに属するセンサ端 末と遭遇することとなり,自身の所属すべきクラスタを自律的に判断することによりクラスタが適切に再構成さ れる.シミュレーションによる評価の結果,初期電力が均一,不均一に関わらず,他手法と比較して80%以上の 情報収集率を30%長い期間にわたって達成可能であることを示した.
[関連発表論文]
- Junpei Kamimura, Naoki Wakamiya and Masayuki Murata, "A distributed clustering method for en-ergy-efficient data gathering in sensor networks," International Journal on Wireless and Mobile Computing, Special Issue on Self-Organisation and Information Integration in Wireless Sensor Networks, vol. 1, no. 2, pp. 113-120, 2006. [pdf]
2.1.3 確実かつ迅速な緊急情報伝達機構(沖電気社との共同研究)
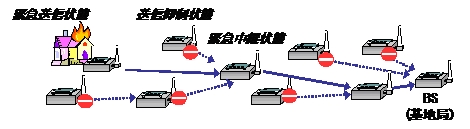
センサネットワークの構築に際し,空調制御の温度・湿度センサなどとあわせて振動センサ,火災センサなどを 導入すれば,侵入検知や火災検知など防犯,防災に役立てることができる.しかしながら,無線リンクは不安定 で信頼性が低く,また,温度,湿度など通常運用の情報との衝突も発生するため,緊急情報伝達においてパケッ ト損や衝突回避のための遅延が発生する.また,省電力のためにスリープ制御を行っている場合には,次ホップ 端末のスリープ解除を待つための遅延が発生する.そのため,侵入や火事などの緊急情報を確実に,また,迅速 に伝達するための制御技術が必要である.
本研究では,通常時は定期的なセンサ情報収集を行っているセンサネットワークにおいて,緊急情報を確実かつ迅速に伝達するための制御手法を提案している.提案手法では,緊急情報の伝達経路上のセンサ端末のスリープ制御を停止するとともに,経路周辺のセンサ端末による非緊急情報の発信を抑制するACM(Assured Corridor Mechanism),ホップごとの緊急情報の再送スケジューリング機構,緊急情報発信ノード周辺での輻輳を軽減するためのレート制御手法,および,ボトルネック端末における輻輳を解消するためのバックプレッシャにもとづくレート制御手法を組み合わせることにより,緊急情報の確実かつ迅速な伝達を実現している.シミュレーション評価により, 100%の配送率と40ミリ秒以下の遅延を達成できることを示した.
[関連発表論文]
- Tetsuya Kawai, Naoki Wakamiya and Masayuki Murata, "Proposal of an assured corridor mechanism for urgent information transmission in wireless sensor networks," to appear in IEICE Transaction on Communications, January 2007.
- Tetsuya Kawai, Naoki Wakamiya and Masayuki Murata, "Design and evaluation of a wireless sensor network architecture for urgent information transmission," submitted for publication, March 2007.
- Tetsuya Kawai, Naoki Wakamiya and Masayuki Murata, "A fast and reliable transmission mechanism of urgent information in sensor networks," in Proceedings of 3rd International Conference on Networked Sensing Sys-tems (INSS 2006), (Chicago), pp. 14-20, May/June 2006. [pdf] [ppt]
- Tetsuya Kawai, Naoki Wakamiya and Masayuki Murata, "ACM: A transmission mechanism for urgent sensor information," to be presented at The First International Workshop on Research Challenges in Next Generation Networks for First Responders and Critical Infrastructures (NetCri 07), (New Orleans, Louisiana, USA), April 2007.
- Tetsuya Kawai, Naoki Wakamiya and Masayuki Murata, "ACM: A transmission mechanism for urgent sensor information," to be presented at The First International Workshop on Research Challenges in Next Generation Networks for First Responders and Critical Infrastructures (NetCri 07), (New Orleans, Louisiana, USA), April 2007.
- 若宮直紀, 河合哲也, 村田正幸, "無線センサネットワークおよびその情報伝達方法." 特願2006-010129, January 2006. 若宮直紀, 河合哲也, 村田正幸, 福井潔, "通信装置及び通信システム." 特願2006-141719, May 2006.
2.1.4 センサネットワークにおける反応拡散方程式にもとづく自律的なパ ターン形成手法
多数の無線センサ端末からなるセンサネットワークにおいては,集中制御は現実的でなく,センサ端末の自律的 動作によってネットワーク全体を制御するのが望ましい.さらに,制御機構はセンサ端末の分布,密度の違いや 通信環境の変化に対する適応性,および障害や故障に対する頑健性を有していることが求められる.生物の体表 の自律的なパターン形成を説明する反応拡散方程式を応用することにより,これらの特徴を有する自律分散的な 自己組織型のタイミング制御,経路制御,トポロジー制御を実現できると考えられる.
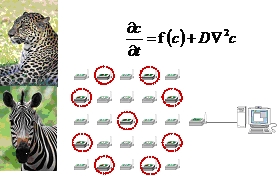
本研究では,反応拡散方程式にもとづくパターン形成の実現性,実用性を検証するため,シミュレーション評価,および実機を使用した実験を行っている.また,パターン形成のためには相当回数の通信・計算が必要なことから,省電力な制御を達成するための高速化手法として手法(a) 反応拡散方程式の離散化に用いる離散ステップを大きくする,手法(b) 制御タイミングあたりの反応拡散方程式の計算回数を増やす,を提案した.評価の結果,いずれの高速化手法も有効であるが,高速化を行わない場合には23%程度の情報欠落が発生してもパターンが形成できるのに対し,高速化を行う場合には4%を超えるとパターン形成率が低下することが明らかとなった.また,高速化手法を適用することによって,4%程度の情報欠落が発生する無線通信環境においても実機によって所望のパターンが形成でき,また,通信回数を1/10に削減できることを示した.
[関連発表論文]
- 兵頭克也, 若宮直紀, 村田正幸, 久保祐樹, 柳原健太郎, "センサネットワークにおける反応拡散方程式を 利用した自律分散制御に関する実験と考察," 電子情報通信学会センサネットワーク研究会, December 2006. [pdf] [ppt]
2.1.5 センサネットワークにおけるアプリケーション要求を考慮したカバ レッジ制御手法
安全・安心な社会を支えるセンサネットワークにおいては,センサの配置した領域を確実にセンシングするとと もに,発生した事象を検知,獲得したセンサ情報を確実かつ迅速に転送することが必要不可欠である.一方,冗 長なセンサ端末のスリープ制御はセンサネットワークの長寿命化に有効であるが,アプリケーションの要求する カバレッジ(センサによる対象領域の監視・観測の度合い)を確保,維持しなければならない.
本研究では,観測領域の十分なカバレッジを確保するための追加ノード配置アルゴリズムと,アプリケーション の要求するカバレッジを維持しつつセンサネットワークの長寿命化を図るスリープ制御について検討している. まず,追加ノード配置アルゴリズムによって,適当にセンサ端末が配置されたセンサネットワークに対し,でき るだけ少ないセンサノードによって,観測領域のすべてがk個以上のセンサノードのセンシング領域に含まれる ための,追加センサノードの配置を決定する.次に,十分な冗長性が確保されたセンサネットワークにおいて, アプリケーションの求めるカバレッジを確保しつつ,センサネットワークの長寿命化を図るため,残余電力を考 慮したスリープ制御を行う.最適なスリープ制御のため,ノード密度,タイマ設定とネットワーク寿命間の関係 をマルコフ過程によってモデル化した.解析結果を用いることで,センサノードが局所的な観測に基づき自身の タイマを設定するエネルギー効率の良いスリープ制御を行うことが出来る.
[関連発表論文]
- Abeyweera Indika Suranjith, "A coverage control mechanism satisfying application requirements in a wireless sensor network," Master's thesis, Graduate School of Information Science and Technology, Osaka-University, February 2007. [pdf] [ppt]
2.1.6 生物の群知能に着想を得たロバストなセンサネットワークアーキテ クチャに関する研究
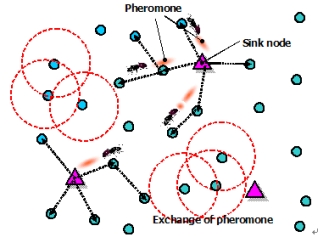
本研究では,複数のシンクノードをもつマルチシンク構成のセンサネットワークを対象として,蟻の群知能に知 見を得た新たなデータ収集手法を提案する.提案手法の目的は長期間にわたって信頼性のあるデータ収集を行う ことである.提案手法において,各センサノードは隣接センサノードとの相互作用とフィードバックを繰り返し ながら次に取るべき行動を決定する.そしてそれらの行動は,目的を達成するのに望ましいクラスタリングやルー ティングが自己組織的に発現させる.このような特性は,耐故障性や信頼性のあるデータ収集に大きく寄与する と考えられる.我々は計算機シミュレーションを通して,提案手法がシンクノードまでほぼ確実にイベントの情 報を送信し,劣悪な品質の無線チャネルにも絶え得る頑健さを兼ね備え,また,センサノードやシンクノードの 故障からの自己修復が可能であることを示した.
[関連発表論文]
- 木利友一,菅野正嗣,村田正幸, "マルチシンク構成のセンサネットワークにおけるロバストな情報収集メ カニズムの提案と評価," 電子情報通信学会 情報ネットワーク研究会, March 2007. [pdf] [ppt]
- Yuichi Kiri, Masashi Sugano and Masayuki Murata, "Self-organized data-gathering scheme for multi-sink sen-sor networks inspired by swarm intelligence," submitted for publication, 2007.
2.1.7 センサネットワークの時刻同期手法のロバスト性に関する研究
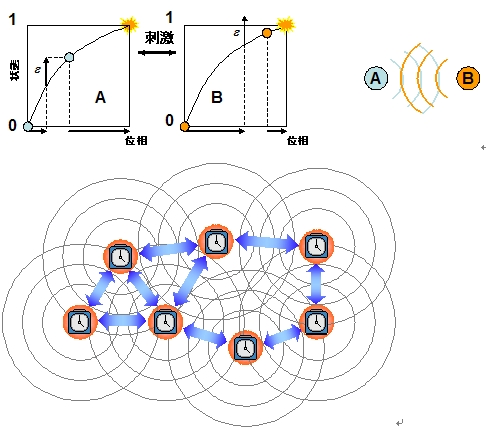
センサネットワークにおいては,効率のよい情報収集や省電力化のためにセンサノード間の時刻同期は重要であ る.多数のセンサが広範囲に配置される大規模なセンサネットワークにおいては,ネットワーク全体に基準信号 を送信することは困難であるため,自律分散型の時刻同期方式が有効であると考えられる.パルス結合振動子モ デルは,蛍の発光や心臓のペースメーカ細胞など,生物界における個体間の局所的な相互作用により全体を同期 させる仕組みをモデル化した,自律分散型の時刻同期方式である.本研究では,このような自律分散型の時刻同 期手法の特性や適用範囲を明らかにすることを目指している.
そこで本研究では,基準ノードからの時刻のずれをマルチホップで伝達することで,ネットワーク全体の時刻同 期を得るマルチホップRBS方式との性能比較を行なった.これら二つの方式に関して,MAC層における遅延の揺ら ぎやパケット損失の影響を考慮し,時刻同期に要する時間や時刻同期の精度などをシミュレーションによって導 出した.その結果,パルス結合振動子による時刻同期は無線通信品質によらない安定度の高い時刻同期を広範囲 の観測領域にわたって実現することができ,マルチホップRBSは接続性の高い環境において短時間で正確な時刻 同期が実現できることを明らかにした.
[関連発表論文]
2.1.8クラスタ間マルチホップ通信を行なう大規模センサネットワークの 性能評価に関する研究
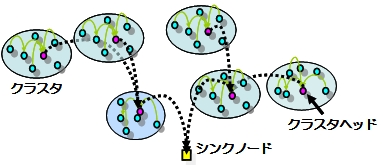
数百から数千もの多数のセンサノードが高密度に配置された大規模なセンサネットワークでは,クラスタを構成 して一旦クラスタ内で情報を収集し,クラスタヘッド間通信によってシンクノードにデータを収集する構成が考 えられる.このようなセンサネットワークでは,シンクノードの近辺に負荷が集中することや,センサノード間 の干渉によるパケット損失が発生することを十分考慮する必要がある.例えば,従来の研究ではネットワーク全 体の消費電力を評価したものが多いが,ネットワークのどの部分の負荷が大きいのか,またセンサノードの寿命 がどのような分布をしているかは十分に明らかではない.また,それらはクラスタの大きさなどのネットワーク 構成パラメータによって大きな影響を受ける.そこで本研究テーマでは,このようなクラスタ間でマルチホップ 通信を行なうような大規模なセンサネットワークを対象として,ネットワークの容量や消費電力を明らかにする ことを目指している.
解析およびシミュレーションの結果,単純なマルチホップ通信と比較してシンクノード周辺での中継に要する高 い負荷を緩和できること,データ収集時間を小さくできることから,大規模なセンサネットワークにおいてはク ラスタ間マルチホップ通信が望ましいことを明らかにした.また,干渉が回避できない場合にどの程度の性能劣 化が生じるかを知っておくことも重要である.我々は,干渉のない送信スケジュールに従うTDMAと,干渉の起こ り得るCSMA/CAとをクラスタ間マルチホップ通信に適用した上で比較し,CSMA/CAを用いるとデータ収集時間は 3.7倍になるが,その一方で消費電力の増加は12%に抑えられることを示した.
[関連発表論文]
- 木利友一,菅野正嗣,村田正幸, "大規模センサネットワークにおけるクラスタ間マルチホップ通信の性能 評価," 電子情報通信学会技術研究報告(IN2006-7), pp. 37-42, May 2006. [pdf] [ppt]
- Yuichi Kiri, Masashi Sugano and Masayuki Murata, "Performance evaluation of intercluster multi-hop commu-nication on large-scale sensor networks," in Proceedings of the 6th IEEE International Conference on Com-puter and Information Technology (CIT 2006), (Seoul, Korea), September 2006. [pdf] [ppt]
- Yuichi Kiri, Masashi Sugano and Masayuki Murata, "On characteristics of multi-hop communication in large-scale clustered sensor networks," IEICE Transactions on Communications, vol. E90-B, pp. 228-238, February 2007. [pdf]
2.1.9 センサネットワークにおける位置推定システムに関する研究
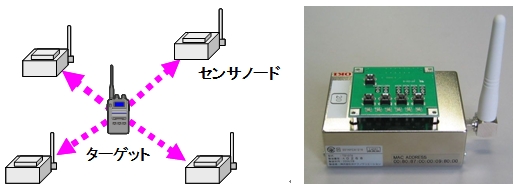
センサネットワークでは,移動可能なターゲットが発した電波を複数の固定センサノードで受信することにより, 受信電波強度(RSSI)を用いてターゲットの位置検出が可能となる.一般にRSSIによる距離推定は誤差が大きいた めに,多くのセンサからのデータを用いることで位置推定の精度を上げることができる.しかしながら,必要以 上のデータ収集は,ネットワークに対する負荷の増大や,センサノードのバッテリ消費を増大させる問題がある. そこで本研究では,センサノード自身が周囲のノード配置密度を検出し,一定の精度を得るために必要なデータ 数を自律分散的に収集する手法を提案し, Zigbee準拠のセンサネットワーク製品である沖電気工業株式会社の ユビキタスデバイスに実装した.実験の結果,室内環境においてセンサの配置密度を0.27個/m2とした場合,位 置推定誤差を1.5〜2m程度まで高められることが明らかとなった.
[関連発表論文]
- Masashi Sugano, Tomonori Kawazoe, Yoshikazu Ohta and Masayuki Murata, "An indoor localization system using RSSI measurement of a wireless sensor network based on the ZigBee standard," in Proceedings of the IASTED International Conference on Wireless Sensor Network (WSN 2006), (Banff, Canada), July 2006. [pdf] [ppt]
2.2 アドホックネットワークアーキテクチャに関する研究
2.2.1 スケーラブルでロバストなアドホックネットワーク経路制御手法 (大阪大学大学院情報科学研究科今瀬研究室との共同研究)
アリは,巣と餌の間に最短経路を構築することが知られている.アリは,餌を発見するとフェロモンを残しなが ら巣に戻る.新たに巣から出たアリはフェロモンを辿ることによって餌に到達し,同様に,フェロモンを残しな がら巣に戻る.フェロモンは揮発性があるため,短い経路にはより多くのフェロモンが蓄積されることになり, 多くのアリを惹きつけるため,ほとんどのアリが最短経路を通るようになる.一方,他の長い経路もフェロモン によってアリを惹きつけることにより維持され,最短経路が失われた際にはそれら代替経路のうち最短のものが 新たに利用,強化されることとなる.
本研究テーマではこのようなアリの採餌行動に着想を得ることにより,適応的で耐故障性を有するマルチパス経 路制御手法を提案している.経路構築においてアリ(制御パケット)は辿った経路のフェロモンを若干量更新す るだけであるため,アリの誤りや消失の経路に与える影響は小さい.その一方で,安定した高品質な経路が構築 されるためには相当量のアリを送信する必要があり,特にノード数が多い場合にはシグナリングオーバヘッドが 問題になる.そこで,アリを送出する際のTTLを多段階化することによってオーバヘッドを抑えるとともに,効 率のよいアリの移動制御手法を提案している.また,ノードの通信能力の差異などによって発生する単方向リン クを積極的に経路に取り入れることにより,より短く,より多い経路を構築する経路制御手法についても検討し, AODVと比較して約1/4の遅延で経路を構築し,約1.3倍のパケット配送率を達成できることを示した.
[関連発表論文]
- Yoshitaka Ohtaki, Naoki Wakamiya, Masayuki Murata and Makoto Imase, "Scalable and efficient ant-based routing algorithm for ad-hoc networks," IEICE Transactions on Communications, vol. E89-B, pp. 1231-1238, April 2006. [pdf]
- Taro Maekawa, Harumasa Tada, Naoki Wakamiya, Makoto Imase and Masayuki Murata, "An ant-based routing protocol using unidirectional links for heterogeneous mobile ad-hoc networks," in Proceedings of International Conference on Wireless and Mobile Communications (ICWMC'06), (Bucharest), pp. 43-50, July 2006. (Best Paper Award). [pdf] [ppt]
2.2.2 カメラセンサネットワークにおける画像データの転送手法
静止画・動画は撮影対象に関する多くの情報をもたらすことから,カメラを利用したセンサネットワークは監視・ 観測アプリケーションを実現する主要な手段である.しかしながら,センサネットワークは電池残量や無線通信 容量の制限があり,また,通信の衝突,雑音による情報欠落が頻繁に発生することから,データ量の多い画像情 報を効率的に,かつ画像品質を保ちつつ転送する転送手法が必要となる.
本研究においては,FEC(Forward Error Correction)によって情報欠落に対する耐性を高めつつ,送受信端末 間に確立された複数の通信経路を効果的に組み合わせることにより,電力効率がよい高品質な画像データ転送を 実現する手法を提案している.提案手法では,それぞれの経路におけるパケット棄却率と消費電力に関する情報 にもとづき,信頼性と電力効率に関する最適化問題を解くことにより,アプリケーションの要求する画像品質を 保ちつつ消費電力を最小化する,経路ごとの転送パケット数を決定する.さらに,受信側端末からのACK受信に よって冗長なパケット送出を抑制することにより,電力消費を抑える.シミュレーション評価により,FECだけ を用いた手法と同程度の信頼性を44%少ない電力消費で実現可能なことを示した.
[関連発表論文]
- Youssef Charfi, Naoki Wakamiya and Masayuki Murata, "Trade-off between reliability and energy cost for content-rich data transmission in wireless sensor networks," in Proceedings of Third IEEE/CreateNet Interna-tional Workshop on Broadband Advanced Sensor Networks (BaseNets 2006), (San Jose), October 2006. [pdf] [ppt]
- Youssef Charfi, Naoki Wakamiya and Masayuki Murata, "Adaptive and reliable multi-path transmission in wireless sensor networks using forward error correction and feedback," to be presented at IEEE Wireless Com-munications & Networking Conference (WCNC 2007), (Hong Kong), March 2007.
2.3 P2Pネットワークアーキテクチャに関する研究
光通信技術によるバックボーンネットワークの広帯域化やアクセス回線の高速化が促進される一方で,多くのユー ザに対しては未だベストエフォートサービスが提供されているのみである.そこで,ベストエフォートネットワー ク上でアプリケーションの望むQoS(通信品質)を獲得するためのオーバレイネットワーク技術に関する研究開 発が盛んに行われており,CDN,Grid,P2Pなど様々なオーバレイネットワークが物理網(IP網)上に構築,運用 されている.本研究テーマでは,オーバレイネットワークの中でも特にユーザ数,トラヒックの多いP2Pネット ワークを対象に,拡張性,適応性,耐故障性のあるネットワーク制御技術の研究を行っている.